Biofilms
form on submerged or moist surfaces when bacteria attach and excrete slimy
biopolymers to protect themselves,
and they are particularly problematic when they develop on urinary
catheters.
Duke University
researchers
from the Research Triangle MRSEC have combined tools from catheter engineering,
microbiology, and the new field of soft robotics to develop a method to
mechanically remove biofilms from the previously-inaccessible interior of
urinary catheters. The
researchers
first grew P.
mirabilis
biofilms
on a silicone sheet and determined that stretching the silicone sheet
would
debond the biofilm.
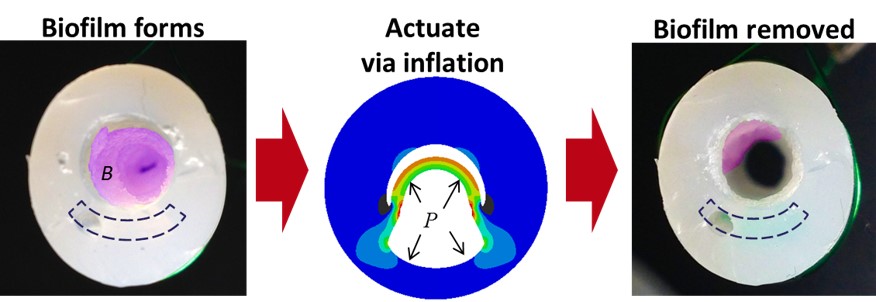
They then designed
a silicone
catheter using
techniques similar
to soft robotics,
a catheter that utilizes
inflation
to achieve
surface strain selectively within the lumen (see Figure). Proof-of-concept prototypes
of sections
biofilm-release catheters
demonstrated
release
of P.
mirabilis crystalline
biofilms (e.g., ≈90%) from interior surfaces.
The work
was first publicly
presented at a
podium presentation at the prestigious Nobel Conference on Biofilm Formation,
and is now in-press
at Advanced
Healthcare
Materials
(2014).