The role of robots is increasing in our daily lives, requiring robots to work continuously for long periods, requiring high energy output. These machines are prone to high heat dissipation due to friction and actuation, especially in DC motors and thermally controlled actuators. A Cornell team investigated whether robots can regulate body temperature by sweating, just as humans do.
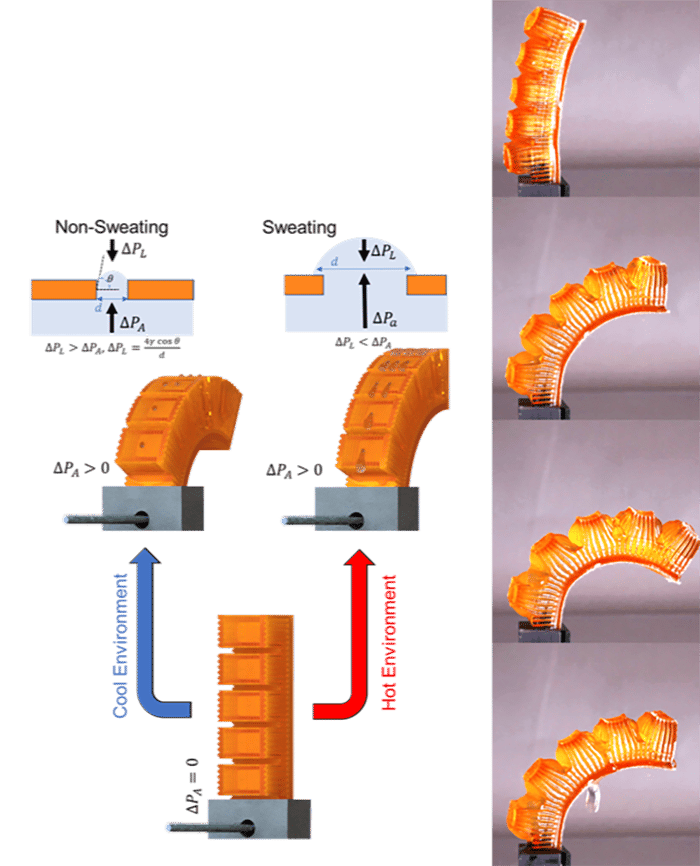
This research has developed autonomic perspiration in finger-like 3D printed hydrogel actuators inspired by biology. The material itself senses the body temperature and thermally regulates it without additional control. When body temperature is low (T < 30°C) the pores are closed; when the temperature rises (T > 30°C), pores start dilating, which enables localized perspiration and actuation simultaneously. The actuator with perspiration demonstrates over 100 W/kg of additional cooling capacity which by weight is ~15 times the cooling power needed by a professional bicycle racer!